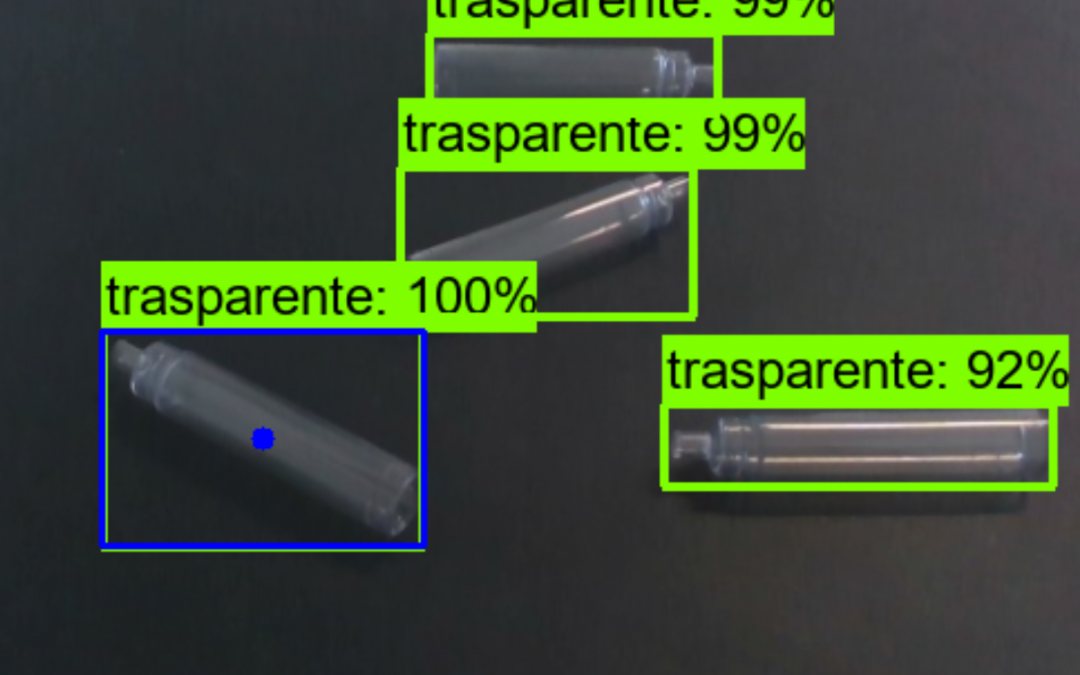
The internship activity of Matteo Tagliavini, computer engineering student, in Ideativa S.r.L. has ended. It was focused on research and development of a robotic solution to remove components through vision system and integration of algorithms of artificial intelligence. The aim was to improve a model of Artificial Intelligence (AI) able to identify precisely the position in space of a biomedical component (“drip chamber”), to pick it up safely and put it in another predetermined place using a collaborative robot. (Cobot Single-arm YuMi).
AI: Object detection & Segmentation