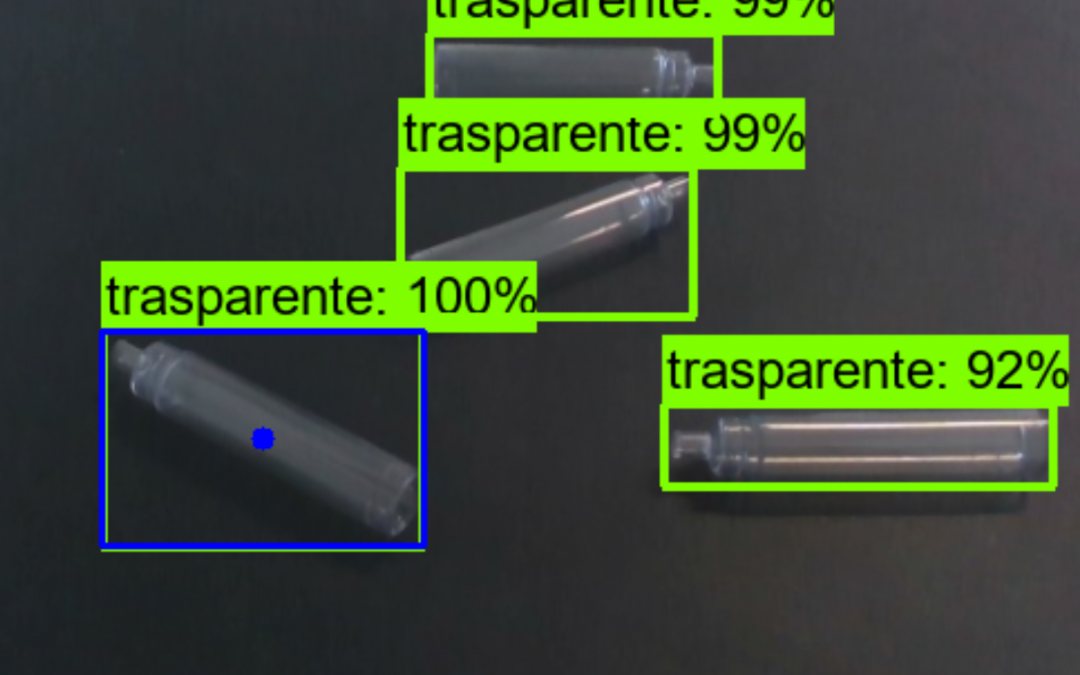
Si è conclusa l’attività di tirocinio svolta dallo studente di Ingegneria informatica Matteo Tagliavini presso Ideativa S.r.L, dedicata alla ricerca e sviluppo di una soluzione robotizzata per il prelievo di componenti mediante sistema di visione e integrazione di algoritmi di intelligenza artificiale. L’obiettivo era quello di implementare un modello di Intelligenza Artificiale (AI) in grado di individuare con precisione la posizione di nello spazio di un componente biomedicale (“drip chamber”) al fine di prelevarlo in sicurezza e depositarlo in un’altra postazione prestabilita tramite l’utilizzo di un robot collaborativo (Cobot Single-arm YuMi).
AI: Object detection & Segmentation